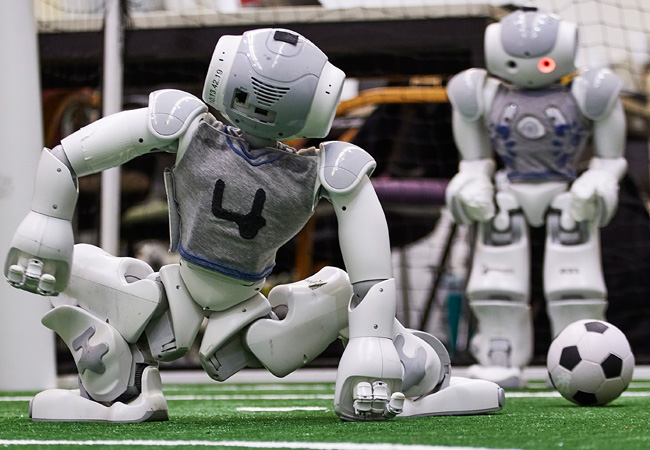
Das Joint Robotics Lab ist ein Gemeinschaftsprojekt verschiedener Professuren des Instituts für Informatik an der Goethe-Universität. Studierende erforschen und entwickeln hier komplexe Algorithmen der künstlichen Intelligenz für autonome Systeme wie Fußball spielende Humanoid-Roboter – die »Bembelbots«.
Anita muss liefern. Der Roboter ist die Stürmerin der Fußball spielenden Roboter-Mannschaft »Bembelbots«. Zielstrebig trippelt sie auf den Ball zu und läuft erst mal daran vorbei. Der schwarz-weiße Ball ist für den Roboter schwer zu erkennen. Zu ähnlich sind die Farben Schwarz und Weiß denen des Feldes, der Tore, der Mitspieler.
Das »Training« der »Bembelbots« im Souterrain des Informatik-Gebäudes auf dem Campus Bockenheim läuft nicht rund. Noch nicht. Wer das Tor schießt, entscheiden die besten Algorithmen. »Jedes Jahr werden die Regeln der RoboCup-Wettbewerbe verschärft«, erzählt Timm Hess, Masterstudent der Informatik: »Früher war der Ball orange, die Tore waren massiv, gelb und blau.
Rund um das Feld ordnete man eindeutige Landmarken über einer Bande an. Die Bande sorgte wiederum dafür, dass die Roboter das für die Bilderkennung störende Publikum nicht ›sehen‹ konnten. « Heute sehen das Fußballfeld und die Spielelemente genauso aus wie beim herkömmlichen Fußball, nur stark verkleinert: weiße Tore mit Netzen und ein schwarz-weißer Ball.
Das Spiel und seine Umgebung sollen dem menschlichen Fußball immer ähnlicher werden. Der Anspruch an Hardware und Software wird deshalb immer größer. Die Informatik- Studierenden des Joint Robotics Lab müssen ihren Robotern jetzt den Farbwechsel von orangem auf schwarzweißen Ball »antrainieren«. Mitte Juni geht es schließlich nach Montreal zur RoboCup-Weltmeisterschaft.
PRAXISBEZÜGE GESTALTEN
Moni, Headbanger, Ritchie, Jutta, Yolanda und Anita. Den Fußball-Robotern auf zwei Beinen gaben die Studierenden durchaus skurrile Namen. Sie sind einem Sketch des hessischen Komiker-Duos Badesalz entlehnt. Auch der Teamname »Bembelbots« sorgt regelmäßig für Lacher. »So viel Humor muss sein«, meint Jens Siegl verschmitzt. Der Informatik-Master-Student ist von Anfang an dabei.
Die »Bembelbots« wurden 2009 ins Leben gerufen. Seither tüfteln im Schnitt rund zehn Studierende in wechselnder Besetzung daran, die menschlich wirkenden Roboter ständig zu verbessern. »Das Studium an der Uni kann manchmal sehr trocken und theoretisch sein. Da kommt die Praxis schnell zu kurz. Deshalb haben wir diese Arbeitsgemeinschaft gegründet«, erzählt Jens Siegl weiter.
»Bei uns lernen und üben wir die verschiedenen Programmiersprachen. Und wenden sie direkt an.« Es gehe vor allem darum, im Team gemeinsam Software zu entwickeln, sagt Siegl. Und natürlich um den Spaß an der Robotik. »Die Fußball spielenden Roboter motivieren in so vielen Bereichen, dass man eigentlich jedem Studierenden wünschen möchte, einmal ein wenig für diese Teams zu programmieren«, sagt Prof. Lars Hedrich.
Er ist einer von vier Professoren, die das Joint Robotics Lab unterstützen. Aus gutem Grund: »Für mich sind die ´Bembelbots` auch technisch sehr interessant und zukunftsweisend. Es sind viele Verknüpfungen zu Lehr- und Forschungsveranstaltungen vorhanden.«
DIE ROBOTER-PLATTFORM

Die autonomen, humanoiden Roboter sind etwa 60 Zentimeter hoch und wiegen ungefähr fünf Kilogramm. Bei den »Bembelbots« ist das Modell NAO von der Firma SoftBanks im Einsatz. Mehr als 6.000 Euro kostet ein Exemplar. Die aktuelle Version hat 25 über Servomotoren steuerbare Gelenke: elf für die Beine, zwei zum Bewegen des Kopfes sowie sechs pro Arm.
»Die Augen, die wir bei den Robotern sehen, sind nur für die menschliche Anmutung da. Zwei LED-Blinklichter, mehr nicht«, erklärt Kyle Rinfreschi, Bachelor-Studierender der Informatik. »Sehen – in Anführungszeichen – können die Roboter mit zwei im Kopf übereinander angeordneten Kameras. Das sind die Hauptsensoren. Die nimmt man als Betrachter aber so gut wie nicht wahr.«
Ein ebenfalls wichtiger Sensor ist der Inertialsensor im Körper des Roboters. Er sorgt für die Korrektur dynamischer Bewegungen und misst in drei Achsen Beschleunigung und Drehgeschwindigkeit. Außerdem enthält jeder Roboter Ultraschallsensoren in der Brust und Drucksensoren unter den Füßen. So kann der Rechner im Roboter seine Position, Stellung und Last abfragen.
DYNAMISCHE ROBOTERBEWEGUNGEN
Von alleine können die NAOs das natürlich nicht. Auch wenn sie selbstlernende, autonome Roboter sind: Programmiert werden sie von ihren menschlichen Coaches, und das ist durchaus sehr arbeitsintensiv: »Ich habe allein ein ganzes Semester dafür benötigt, meinen ›Bembelbot‹ so zu programmieren, dass er von alleine wieder aufsteht, wenn er umgefallen ist«, erzählt Kyle Rinfreschi. Das stabile humanoide Laufen ist eine große Herausforderung.
Vor allem, weil der Oberkörper einen Großteil der Masse des Roboters ausmacht. Da kommt ein »Bembelbot« bei seinen Hauptbewegungen schon mal ins Trudeln. Laufen auf einen bestimmten Punkt in einem bestimmten Tempo, Schießen und Aufstehen – all das sind komplexe Aufgaben, die das Zusammenspiel von Hunderten Algorithmen erfordern. Die größte Anstrengung dabei ist, dem Roboter beizubringen, Fußball in der Gruppe zu spielen.
FAST WIE BEIM ECHTEN FUSSBALL

Beim RoboCup spielen Roboter in verschiedenen Ligen Fußball. Das Ziel der RoboCup Federation: Bis zur Mitte des Jahrhunderts soll eine vollständig autonome Roboter-Mannschaft den dann amtierenden menschlichen Weltmeister besiegen. Eine dieser Ligen ist die RoboCup Standard Platform League (SPL). Hier spielen die »Bembelbots« mit. Die Besonderheit dieser Liga:
»Sie ist die einzige RoboCup-Fußball-Liga, bei der alle teilnehmenden Teams den gleichen NAO-Roboter nutzen müssen. So haben alle die gleichen Grundbedingungen, die gleichen Chancen«, erklärt Timm Hess. »Sie unterscheiden sich nur in Farbe oder Trikot. Und der Software.« Fünf Roboter stehen bei diesen Wettbewerben auf dem Platz. Das ist derzeitiger Standard.
SCHIESSEN ODER PASSEN
Zuletzt nahmen die »Bembelbots« an den deutschen Meisterschaften in Magdeburg teil. Warm-up für die Weltmeisterschaft in Montreal. Dort trafen sie auf die anderen deutschen Teams. Die Besten seien das Team »B-Human« von der Universität Bremen, erzählen die Frankfurter Studierenden. Harte Konkurrenzgefechte liefern sich die teilnehmenden RoboCup-Teams allerdings nicht.
Im Vordergrund steht der offene Austausch von Informationen und auch von Software. Eine der Regeln der RoboCup Federation besagt sogar, dass die besten Teams einer Weltmeisterschaft Teile ihrer Software dokumentieren und veröffentlichen müssen. Viele Mannschaften stellen auch ohne diese Regel Software als Open Source bereit, legen mehr offen, als sie eigentlich müssten.
Dadurch konnten sich im Laufe der Jahre einige Bewegungsansätze als besonders erfolgreich etablieren. »Deep Learning« etwa ist der neueste Trend: Roboter sollen eigenständig Objekte erkennen lernen. So wird – das hoffen alle – auch »Bembelbot«-Stürmerin Anita während der WM in Montreal den schwarz-weißen Ball treffen und ein Tor schießen.
Autorin: Heike Jüngst
Dieser Artikel ist in der Ausgabe 39 des Alumni-Magazins Einblick erschienen.